Note
Go to the end to download the full example code.
Isotropic elasticity examples
import numpy as np
import simcoon as sim
import matplotlib.pyplot as plt
import os
In thermoelastic isotropic materials three parameters are required:
The Young modulus \(E\),
The Poisson ratio \(\nu\),
The coefficient of thermal expansion \(\alpha\).
The elastic stiffness tensor and the thermal expansion coefficients tensor are written in the Voigt notation formalism as
with
The tangent stiffness tensor in this case is \(\mathbf{L}^t = \mathbf{L}\). Moreover, the increment of the elastic strain is given by
where \(\delta_{ij}\) implies the Kronecker delta operator. In the 1D case only one component of stress is computed, through the relation
In the plane stress case only three components of stress are computed, through the relations
In the generalized plane strain/3D analysis case the stress tensor is computed through the relation
umat_name = "ELISO" # This is the 5 character code for the elastic-isotropic subroutine
nstatev = 1 # The number of scalar variables required, only the initial temperature is stored here
E = 700000.0
nu = 0.2
alpha = 1.0e-5
psi_rve = 0.0
theta_rve = 0.0
phi_rve = 0.0
solver_type = 0
corate_type = 2
props = np.array([E, nu, alpha])
path_data = "data"
path_results = "results"
pathfile = "ELISO_path.txt"
outputfile = "results_ELISO.txt"
sim.solver(
umat_name,
props,
nstatev,
psi_rve,
theta_rve,
phi_rve,
solver_type,
corate_type,
path_data,
path_results,
pathfile,
outputfile,
)
outputfile_macro = os.path.join(path_results, "results_ELISO_global-0.txt")
fig = plt.figure()
e11, e22, e33, e12, e13, e23, s11, s22, s33, s12, s13, s23 = np.loadtxt(
outputfile_macro,
usecols=(8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19),
unpack=True,
)
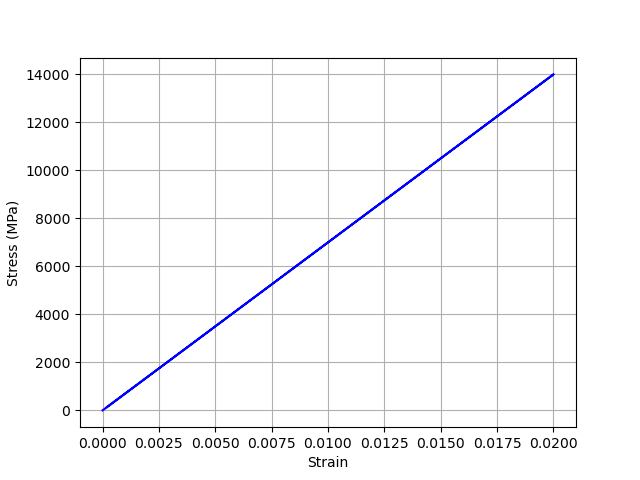
plt.grid(True)
plt.plot(e11, s11, c="blue")
plt.xlabel("Strain")
plt.ylabel("Stress (MPa)")
plt.show()
Total running time of the script: (0 minutes 0.048 seconds)